


2.5M+
Active Users Worldwide

80%
Improved Learning Retention

60%
Reduction in Laboratory Costs
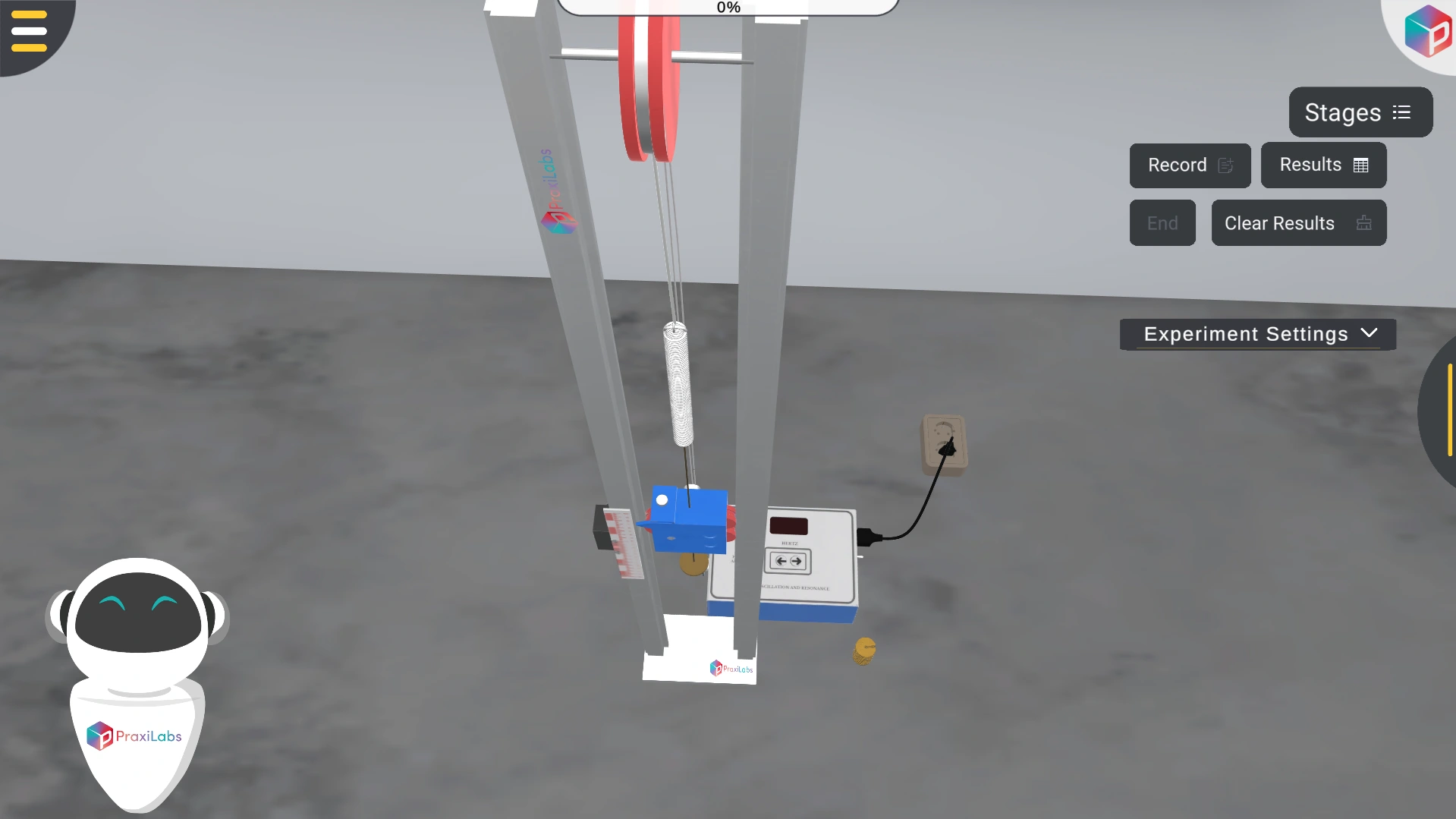
In the spring constant experiment, you are going to determine the force constant of a spring statically and dynamically using simple harmonic oscillator simulation.
Part (I): Determination of the Force Constant of the Spring Statically by using spring constant simulation In a resonance physics lab, set the apparatus up as shown in Figure (1), making sure the metre rule is parallel to the spring attached to the clamp. Next, in the spring constant virtual lab, measure the natural length of the spring with no force applied to it. With a known mass, apply to the end of the spring and measure the new length during the simple harmonic motion experiment. Figure 1. The experiment setup. Record the data in the table below: Mass (gm) F=mass(kg) * g ∆L=L-L0 Where g is the gravity which is equal to 9.8 m/ s2. Repeat the procedure by increasing the known mass to obtain enough results to formulate a graph. Once all data is collected, use the raw data to create the following graph: Figure 2. Force (N) vs displacement (m) Calculate the value of the spring constant from the equation using a spring constant calculator: F=mg=k ∆L slope=F∆L=k Part (II): Determination of the Force Constant of the Spring Dynamically by using spring constant lab This part deals with the dynamically determined spring constant. By displacing the spring from equilibrium, the system will oscillate. By measuring the mass of the system and its period of oscillation, the value of the spring constant can be deduced. First attach the spring to the clamp stand and attach the mass holder to the spring as shown in the figure below. Then attach the first mass. Wait until the spring stops moving completely, then place the fiducial marker at the very bottom of the mass holder, using the metre ruler to align it perfectly. This represents the center of oscillations and will make it easier to count how many oscillations the mass-spring system has undergone (as shown in figure below). Figure 3. Fiducial marker Then, pull the spring down slightly and let it go so that it is oscillating with a small amplitude and in a straight line. As the bottom of the mass holder passes the fiducial marker, start the stopwatch and count the time taken for it to complete 20 full oscillations (T20). For each different mass record the value of time taken to complete 20 full oscillations in the following table. mass (gm) T20 (sec) T=T2020 (sec) T2 (sec2) Then, plot a graph between T2 in y-axis and mass (kg) in x-axis. Figure 4. Time2(sec2) vs mass (kg) Calculate the value of the spring constant from the equation: T2=42km+42kM k=42slope
By the end of the simple harmonic oscillator simulation, the student should be able:
In the simple harmonic oscillator simulation:
Fs=-kx (1)
where Fs is known as the spring force.
Figure 5a. When the displacement is to the right (x > 0) the spring force is directed to the left ( Fs< 0).
Figure 5b. When the displacement is to the left (x < 0) the spring force is directed to the right ( Fs> 0).
Figure 5c. In both cases shown in Figures 5a and 5b, the effect of the spring force is to return the system to the equilibrium position. At this position, x= 0 and the spring is unstretched, signifying Fs= 0.
Figure 6. A body of mass, m, is suspended from a spring having a spring constant, k. If the system is in equilibrium the spring force is balanced by the weight of the body.
Fs=-kxf-xi=-k∆x where ∆x is the body's displacement.
Figure 7. Experiment setup



I love the idea of virtual labs. It's gonna be something that takes our R&D and work in labs to another level. And I look forward to seeing what PraxiLabs can do with it.
Michelle Anderson, Head of Innovation
IE University - Spain
Although there are now several vendors offering virtual reality software for physics labs, there is only one that offers a realistic, I feel like I’m in a real lab solution: PraxiLabs.
Dr. William H. Miner, Jr., Professor of Physics
Palm Beach State College, Boca Raton, FL
PraxiLabs offered my students a chance to actively engage with the material. Instead of watching videos on a topic, they could virtually complete labs and realize the practical applications of class topics. This is a quality alternative to in-person labs.
Crys Wright, Teaching Assistant
Texas A&M University, USA
With the onset of the COVID-19 pandemic, we found ourselves in a situation that forced us to act quickly to find the best solution available to provide our students with a quality molecular genetics laboratory experience.
Korri Thorlacius, B.Sc., Biology Lab. Instructor
Biology Department - Kwantlen Polytechnic University